Lead Instructor for MECH339, Mechatronics 1
Fleming College

Please wait...

Omid is an athlete, artist, dreamer and achiever that loves a deep conversation and always gives it to you straight. Early on in his career, he worked on Navigation of AMRs and AVs. Throughout his professional life, majority of his work has been focused on solving challenges in product development, marketing, sales, strategic partnerships, and project management. He has been fortunate to work with strong-minded teams that make every single moment of the battle feel like a playground filled with compelling lessons.
At this juncture of his life, his vision and main drive to build a future where robots are an inevitable part of our lives, thrills him the most. To foresee this future, all non-trivial robots are required to navigate effectively in any environment, make competent and conscious decisions, and constantly improving themselves.
He is determined to help fight against poverty, food waste, and energy waste in this modern age to make it possible for every single individual on this planet to have the opportunity to look pass these adversities and contribute to this impactful credo.
Adjunct Faculty
Fleming College, School of Trades and Technology
Research Assistanat
Ryerson University, NCART Lab
Scholar
McMaster University, Smart Joint Lab
Research Assistant
Shahid Beheshti University, Electronic Lab
Master of Engineering in Electrical and computer Engineering
Ryerson University, Toronto, ON
Bachelor of Science in Electrical Engineering
Shahid Beheshti University, Tehran, Iran
Throughout my exposure to robotics, I have been working on Autonomous Mobile Robot (AMR) applications. My experience on Highway Traffic Estimation, a Kalman filter approach from bachelor drove me to implement selected SLAM systems and navigation methods on a modified AMR. Along this study, I surveyed various SLAM systems on typical indoor environments. My findings showed how non-flat surfaces, glasses, and dynamic areas could seriously fail the performance of AMRs.
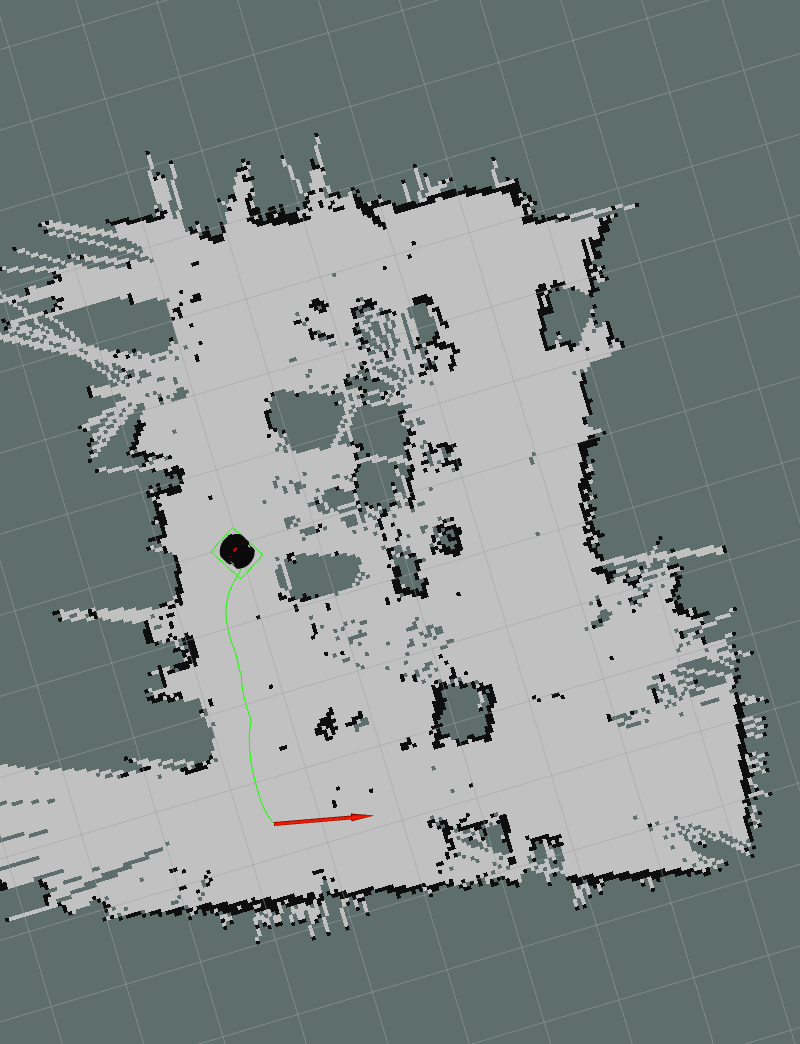
You can watch a demo of my work here

Details
Fleming College
Fleming College
Fleming College
Fleming College
Fleming College
Ryerson University
Fleming College
Fleming College
Radmehr Academy
Please feel free to contact me.
all rights reserved © 2018